Research Directions
Three paths toward life-like robotic intelligence
Our research connects tactile perception, embodied dexterity, and miniature biomedical robotics.
Each direction is grounded in real robotic systems and supported by representative publications.
Direction 01
Tactile Perception & Artificial Skin
Touch is a primary channel through which living systems understand the world. We develop tactile sensors,
artificial skins, soft sensing interfaces, and perception algorithms that allow robots to feel contact,
infer physical states, and respond to complex interaction.

Soft tactile sensing and force / temperature decoupling.

Distributed force decoding for hand-centric interaction.
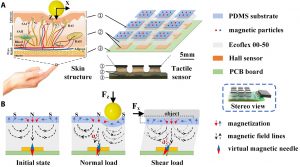
Super-resolution tactile sensing and robotic manipulation.
Representative Publications
01
Digital channel-enabled distributed force decoding via small datasets for hand-centric interactions.
Science Advances, 11, eadt2641, 2025.
02
Soft magnetic skin for super-resolution tactile sensing with force self-decoupling.
Science Robotics, 6, eabc8801, 2021.
03
A Soft Tactile Unit with 3D Force and Temperature Mathematical Decoupling Ability for Robots.
Engineering, 2025.
04
Natural gum-based electronic ink for directly on-skin electronics.
Representative work on skin-like electronics.
Direction 02
Embodied Dexterity & Physical Intelligence
Intelligence is not only computed; it is formed through body, material, motion, and interaction.
We study embodied robotic intelligence, bioinspired mechanisms, adaptive locomotion, contact-rich control,
and physical systems that respond intelligently to their environments.
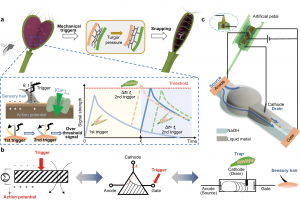
Material-based logic and nature-inspired intelligence.
Reconfigurable small-scale robots and adaptive behaviors.
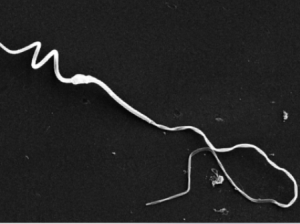
Bioinspired propulsion, locomotion, and adaptive motion.
Representative Publications
01
A liquid metal-based module emulating the intelligent preying logic of flytrap.
Nature Communications, 15, 4761, 2024.
02
Milli-scale cellular robots that can reconfigure morphologies and behaviors simultaneously.
Nature Communications, 13, 4156, 2022.
03
Self-adaptive propulsion of Ray sperms at different viscosities enabled by heterogeneous dual helixes.
PNAS, 118, e2024329118, 2021.
04
One-step formation of polymorphous sperm-like microswimmers by vortex turbulence-assisted microfluidics.
Nature Communications, 2024.
Direction 03
Miniature & Biomedical Robotics
At small scales, robots begin to interface directly with living systems. We design miniature,
bioinspired, and intelligent robotic systems for biomedical sensing, diagnosis, intervention, and therapy,
exploring how machines can work with life rather than only around it.
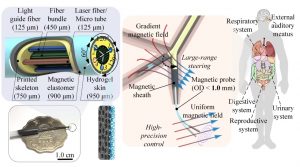
Submillimeter fiberscopic robots with maneuvering, imaging, and operation abilities.
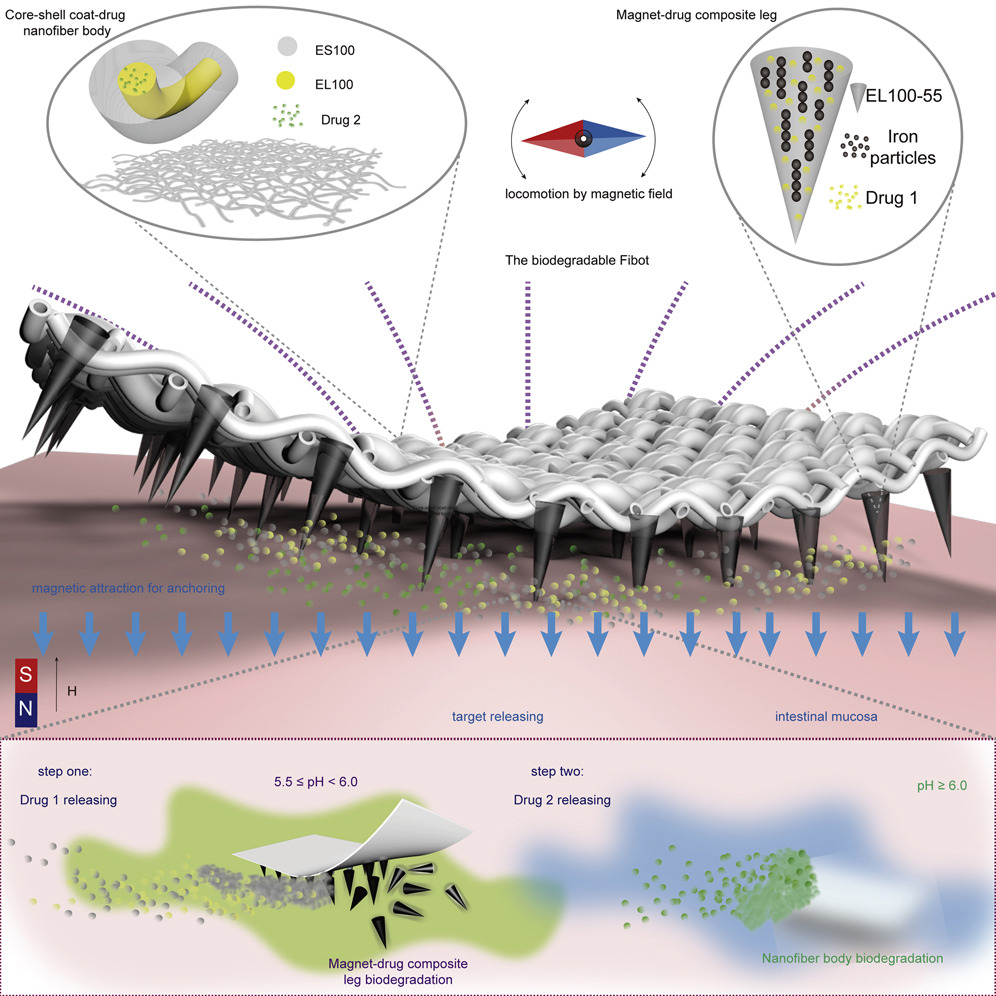
Biodegradable millirobots for anchoring and adaptive stepwise drug release.

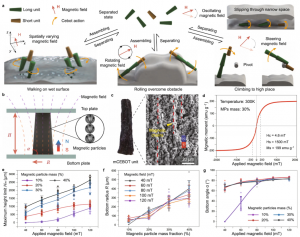
Magnetic spray transforming inanimate objects into biomedical millirobots.
Representative Publications
01
Sub-millimeter fiberscopic robot with integrated maneuvering, imaging, and biomedical operation abilities.
Nature Communications, 15, 10874, 2024.
02
Nanofiber-based biodegradable millirobot with controllable anchoring and adaptive stepwise release functions.
Matter, 5, 1277–1295, 2022.
03
An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedical applications.
Science Robotics, 5, eabc8191, 2020.
04
A bioinspired multilegged soft millirobot that functions in both dry and wet conditions.
Nature Communications, 9, 3944, 2018.